
Products
Industries
LinkAige
About



The latest research progress in robotics and artificial intelligence helps autonomous driving technology become more and more applicable in daily life and industry scenarios. The robotaxi and the autonomous trucking systems are built mainly based on vehicle on-board sensors and computing units. As the operation domain on public roads involves large-scale scenarios regarding locations and objects, an intelligent vehicle must be able to make its decision with its own perception and localisation inputs. Although many V2V and V2I solutions are employed to help deal with complicated situations, the system coverage is limited. The management system of a fleet of robotaxi or autonomous trucks is usually rather a platform managing ride-sharing or logistic orders than a system coordinating the traffic flow because the majority of road occupants are still manually driven vehicles.
On the other hand, if an autonomous vehicle is working in a closed environment, for example, container terminals or logistic hubs, the operation domain is well-defined and bounded in the region. Without a doubt, the problem complexity is reduced by orders of magnitude, especially the corner cases. In addition, a centralised traffic management system can greatly improve the productivity of the autonomous fleet by optimising the routes to reduce travel time or waiting time. The reasonable size of operation space enables full coverage of smart infrastructures to boost the perception range of a single vehicle. The information gathered either by smart vehicles or roadside units can be uploaded and help the central system to make global decisions.
During the years of pioneering autonomous fleet operation in several container terminals, Westwell gained a significant amount of experience in managing and optimising the operation. The team has developed a fleet management system that addresses global route planning and coordinates the traffic with V2X data. The following sections will make a brief introduction to the fleet path planning approach and the V2X applications with remote vehicle localisation solutions.

A fleet management system (FMS) in container terminals started with the deployment of automated guided vehicles (AGV). At that time, the AGV operated in areas isolated from manual trucks, FMS had complete knowledge and control of the traffic on the field. Routes and paths could be designed and optimised offline. The fleet could operate as a machine with well-synchronised clocks. Only limited exception handling was required. In this system, a single AGV only needs to have basic collision avoidance functionality. Its major task is to follow the exact trajectory commanded by the FMS. An AGV doesn't need to negotiate with the traffic, as the FMS already sorts out all the sequences and resolves all the conflicts.
The situation becomes more challenging with mixed traffic scenarios, as an autonomous truck (AT) operates together with manual trucks without time or space separation. The most straightforward solution is to let the AT determine its route and path, and FMS only provides the destination and some middle waypoints. This approach is the same as the robotaxi on public roads, which is easy to scale and supports many ATs. However, since an AT only has a limited range of sensing, it can only come up with local optimal decisions. The situation becomes even more tricky in conflicts, for example, uncontrolled intersections or merges. Rules need to be carefully designed to avoid deadlock of multiple ATs. To solve complicated deadlocks and optimise the traffic flow, FMS started to act as a coordinator in many cases.
Thus, Westwell's global path planning is born again, but quite different from the initial one. The latest development of the path planning strategy is to combine the global path planning in FMS and the local path planning from AT. FMS can optimise the traffic flow from the global perspective, while AT has the flexibility to manoeuvre in its close environment.
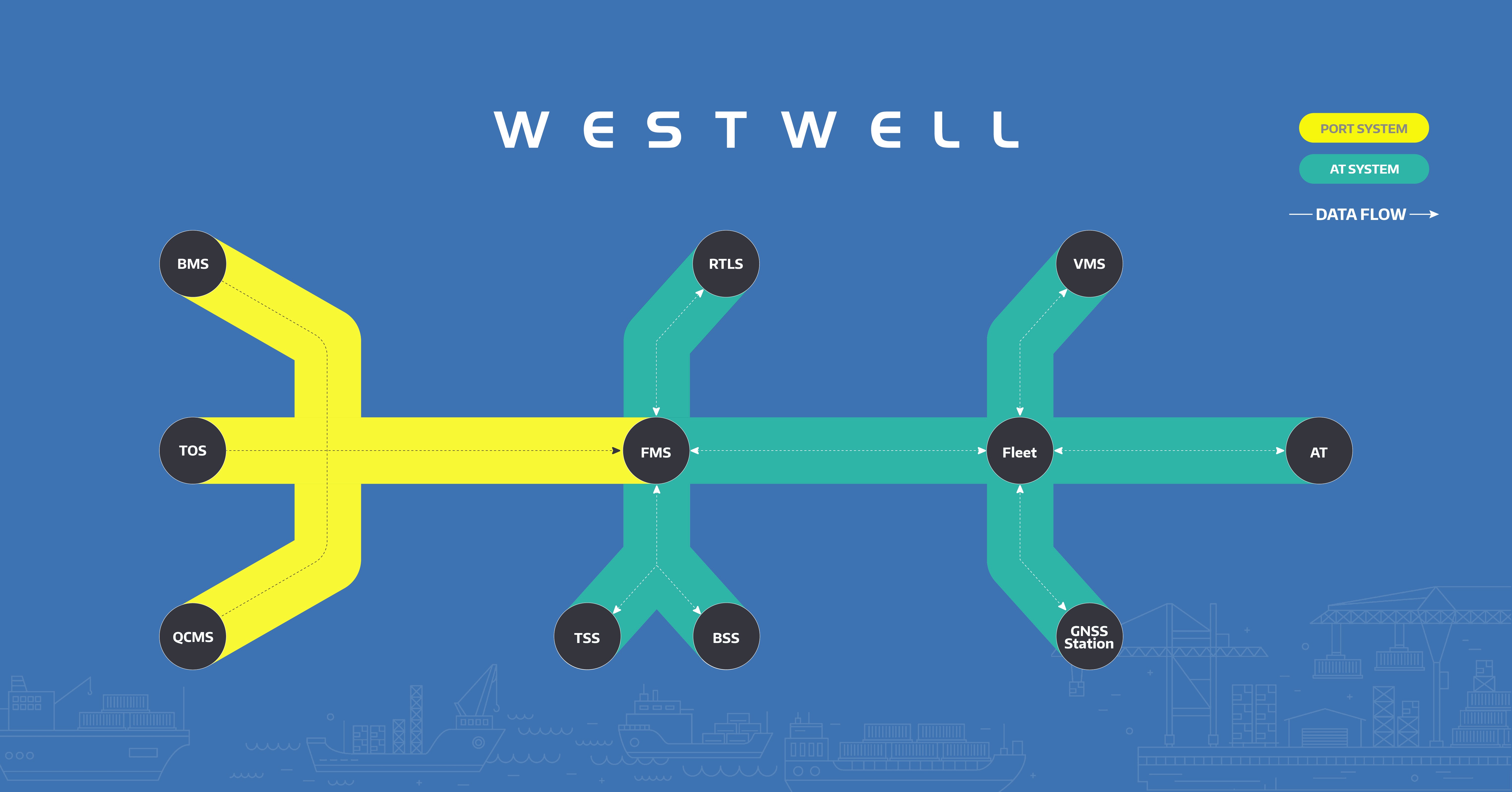
The figure illustrates an example of Westwell's system blocks in the container terminal. The yellow parts are the existing port systems and the green ones are the AT systems. According to this architecture, FMS is the centre node communicating with the terminal operation system (TOS), block management system (BMS), quay crane management system (QCMS) and the AT fleet. Besides its basic functionalities for task management, exception handling and workflow management, it also plans and manages AT paths on the global level for the following purposes:
Westwell's global path planning depends on the precise knowledge of the entire traffic situation. FMS has access to the autonomous fleet state and crane status by design. However, if the manual traffic data is missing, it can only get the big picture with a significant size of autonomous fleet. In this case, the V2X infrastructure is developed to fill the gap.
To gain a full vision of all the traffic in the terminal, there are several ways to detect and track non-autonomous vehicles. The most direct method is to install a connected device with global localisation in a vehicle. It is applicable for all terminal-owned vehicles with a certain amount of cost. But it is almost impossible to equip every external vehicle. With the help of AI technology, detecting and tracking a vehicle with a camera image becomes state-of-the-art technology. As many terminals have high surveillance camera coverage, the CCTV video image can be used to detect and track vehicles and pedestrians. Following this idea, a terminal surveillance system (TSS) called WellSecurity is developed to detect and map objects to terminal road networks. It can then identify rule violations and hazardous situations.
As illustrated in the system block diagram, TSS is connected to FMS. It sends the real-time vehicle and pedestrian location to FMS. Combining all the information, Westwell's FMS can build a bird’s-eye-view of the terminal with all the moving objects for global planning.
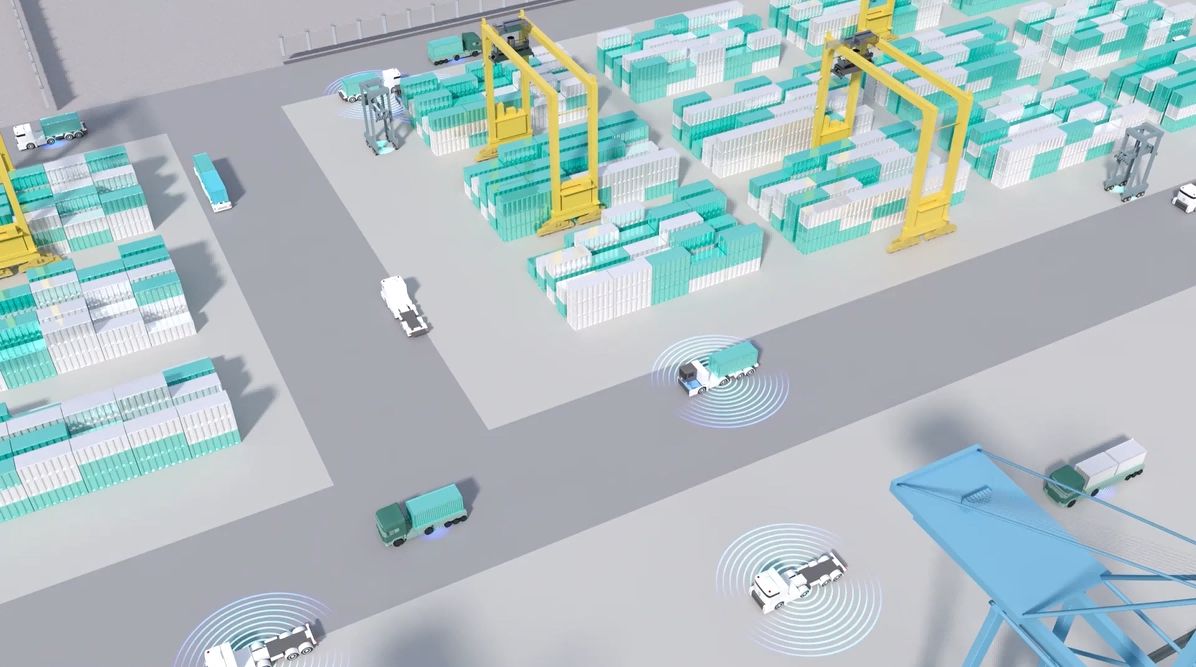
One good use case is at the intersection entering a block. Since an AT has a limited sensing range or may be blocked by other obstacles, it is not always aware of the situation at the first several bays of the block. In case of a manual vehicle stopping at the first bay, AT may end up queuing behind and blocking the intersection. With V2X detecting the obstacle in advance, AT can choose the bypass lane or wait outside the intersection.
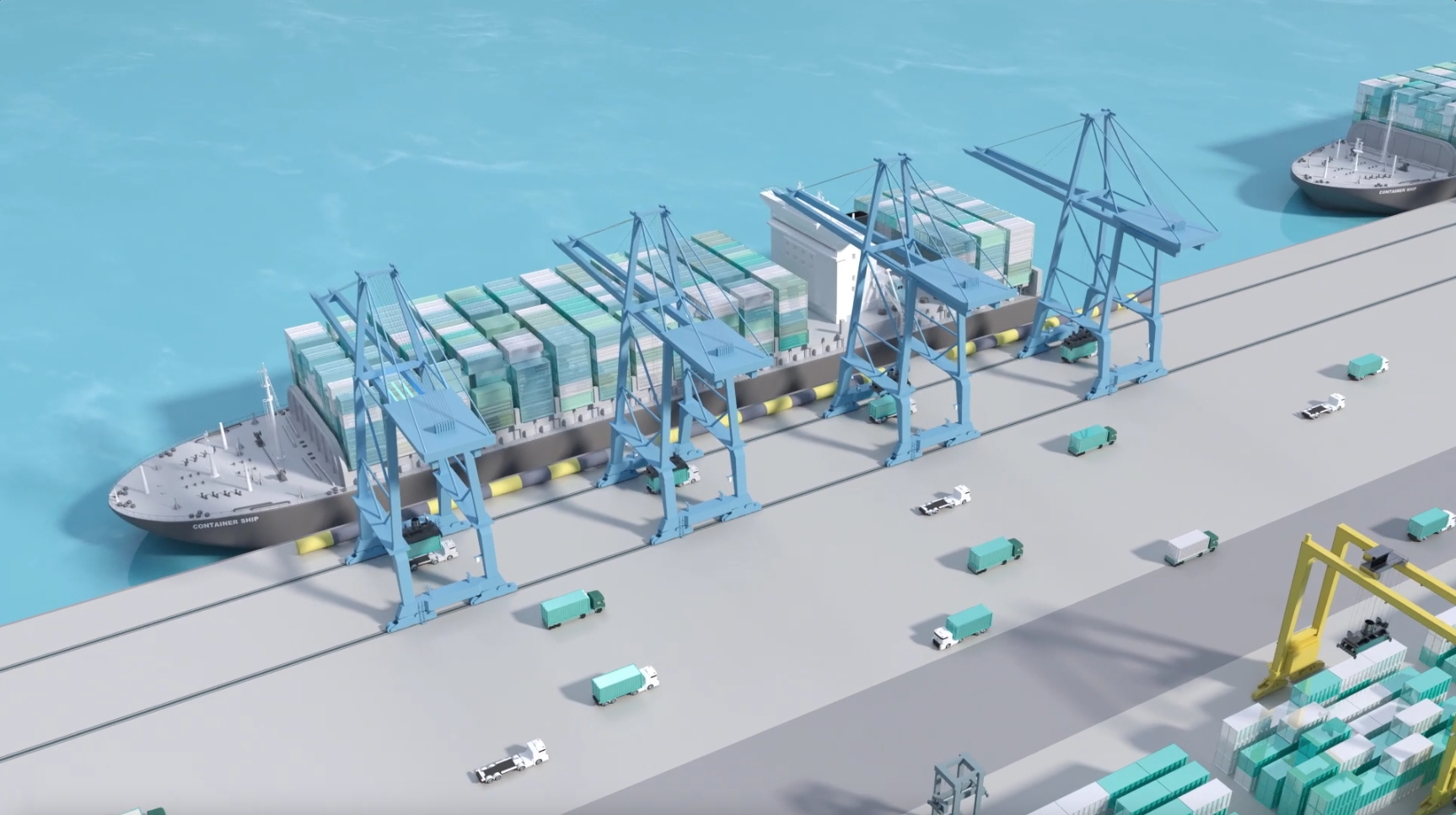
Another effective scenario is helping AT to navigate through congested traffic under quay cranes. It is common that due to the busy loading or discharging operation, multiple lanes under quay cranes are blocked. Rather than waiting in line, FMS can let an AT change lanes and move to an unoccupied crane or cut-out to use a free lane to bypass any vehicle that is waiting for service.
The V2X can provide information beyond the sensing range of an AT. Therefore, a Westwell's AT becomes smarter than an experienced human driver.
After implementing and deploying the FMS and TSS with global path planning and V2X functionalities, we see a significant boost in fleet performance even in complicated mixed traffic operations. There are still several challenges and room for improvement in this system. Firstly, the handshake between global and local path planning requires reliable and low-latency network communication. Second, the flexibility of the AT local planning asks FMS to process the change requests in time and deal with swarming intelligence problems. Rather than commanding the ATs one by one, it is desired to help them to cooperate. With the V2X information about manual vehicles, AT can learn from experienced human drivers to handle difficult situations. The ultimate goal is to achieve close or beyond human fleet performance with less infrastructure burden and excellent scalability.